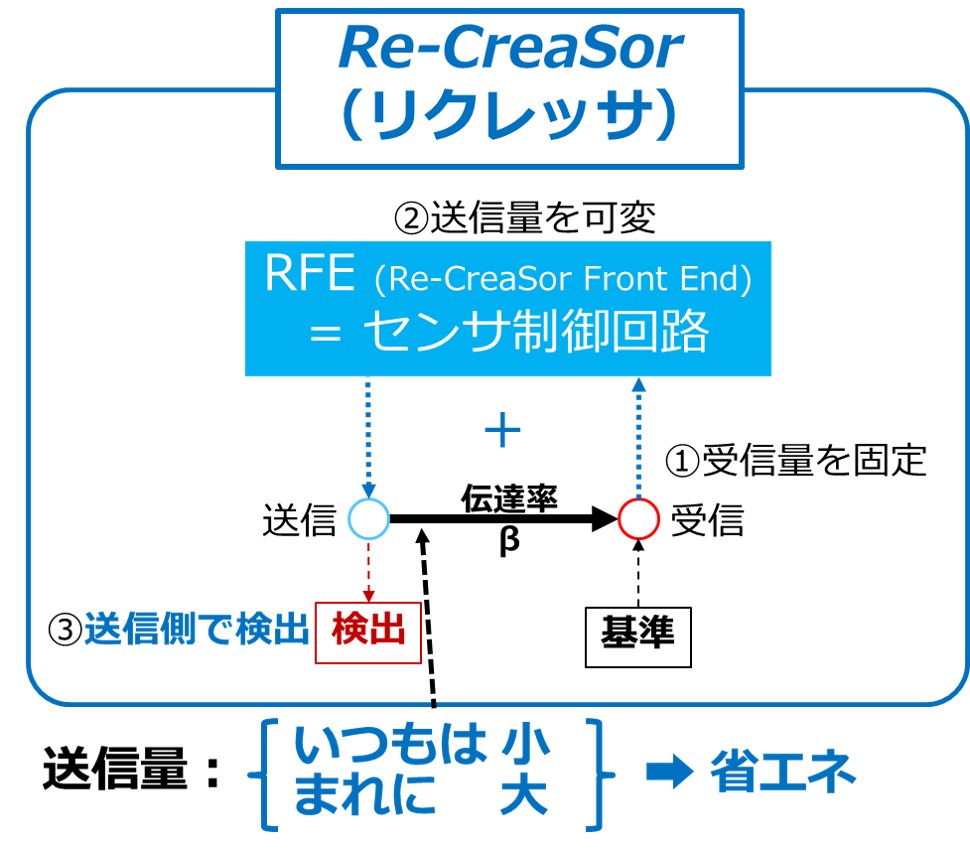
リクレッサ・ラボは、光電センサの様な送信と受信を持つセンサにセンサ制御回路を追加する事で、送信側で検出する「リクレッサ」を開発しました(特許第6749717号)。
「リクレッサ」は原理的な内容のため応用範囲は広いのですが、ここでは光電センサへの応用を想定して、リクレッサの動作・効果・応用について紹介いたします。
リクレッサでは、送信と受信の動作がセンサと正反対になります。
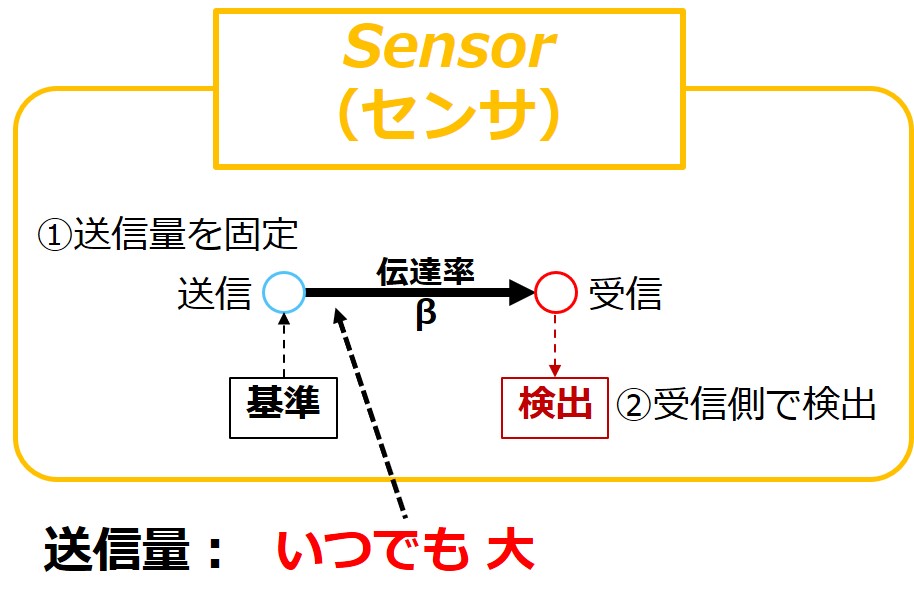
センサでは送信側が検出の基準のため送信量が固定され、送受信間の状態を受信側で検出します(受信量は、未検出時多く検出時は少ない)。
(送受信間が遠い等)使用する最悪条件でも受信出来る大きな送信量が必要な為、未検出時でも送信素子でエネルギーを多く消費します。消費する電力が多いと、送信素子の寿命が短くなるので、長期間連続して検出し続ける用途では特に注意が必要です。
また、(送受信間の伝達率が低い場合等)送信側から送られた検出信号の受信量が小さい時には外光の受信量が無視できない検出誤差となりますので、外光が多いとか変動する場所で使用する際には注意が必要です。
リクレッサでは受信側が検出の基準のため受信量が固定され、センサ制御回路の働きで送受信間の状態に応じて送信量が変化し、送信側で検出します(送信量は、未検出時は必要最小限で検出時は多い)。
リクレッサでは未検出時の送信量がセンサより少ない為、通常未検出で稀に検出する様な用途では省エネかつ長寿命となります。
また、検出信号の受信量を受光出来る最大値に固定すれば、外光の受信量の検出誤差を最小化出来るので、強外光耐性センサを作れます。
実際には、必要な省エネ性能・寿命要求と外光耐性のバランスを考えて適切な動作点を設定して使う事になります。
リクレッサをより深く理解いただく為に、試作品の実測データと解説記事のページ(実測データと解説)を用意しましたので、参考にして下さい。
光電センサにリクレッサを応用した場合、主に以下の効果が有ります。
送信量が固定の従来方式では、透過率が低い場合でも検出可能とするため常時大きな送信量が必要ですが、リクレッサでは送信量を変化させて検出する為、通常(未検出時)送信量が少ない使い方(透過型)とする事で、送信素子(IREDやLED等)の光量低下要因の発光量・発熱量が減り、送信素子の光量低下が抑えられます(長寿命化)。これにより、使用時間が長くても光量低下による検出誤差を低減できます。
On/Offの2値出力のセンサであれば、光量が低下してもOn/Offのスレッショルドを下回らなければ正常に動作しますが、デジタル数値で出力するセンサの場合は、光量の低下分だけ数値も低下し、センサの検出誤差となります。
照明機器では30%や50%低下を寿命として定義する場合が多いですが、数値出力するセンサでそんなに低下しては誤差が大きすぎるので、5%、2%、1%、0.5%、0.2%、0.1%等、要求誤差レベルをまず明確にする必要が有ります。要求誤差レベルまで低下する時間が短いと、センサとして連続して使用出来る時間に制約がつく為、数値出力のセンサでは光量低下を抑える事は極めて重要と言わざるを得ません。
受信量の変化で透過率検出する従来方式では、受光量に占める受信量と外光の比率が透過率によって変化します。
しかし、受信量固定のリクレッサでは、「受信量を受光素子の定格範囲内で自由に設定出来る」ので、受信量を常時受光素子の定格範囲内で大きく設定しておけば、外光による誤差が常に少なくなります。
リクレッサでは受信量が変化しない様に送信量が自動的に変化するので、従来センサで設置時に必要だった送信量の手動調整は不要です。
送・受信の光軸合わせも電流値を確認しながら微調整出来るので調整が容易です。
未検出状態(待機状態)では送信駆動電流が少ない為、電池動作時間がセンサより長くなります。
電源電流は送信電流の割合が多い為、電源電流で検出する事も可能です。(電源回路の過度電流等で問題が無いか確認が必要です)
送受信間の距離を固定する事で、送受信間に存在する物質の透過率検出により、例えば、以下の物質の量を数値化する事が出来ます。
これらを常時数値化し、危険や異常発生或いは目標達成状況をリアルタイムで検知・警報等を発報、更に過去の数値変化をAI等で解析しておけば、危険や異常の予兆検知や目標達成時期を推定出来る可能性が有ります。
送受信間に何もない状態で、送受信センサの距離を変化させると、送信電流が変化します。この送信電流で、送受信センサ間の距離を検出する事が出来ます。距離検出の実測例は、 送信電流の距離特性(実測値) を参照下さい。
光電センサは工場や流通倉庫での物の通過検出、防犯や自動ドア等での人の通過検出、券売機やコピー機での紙の通過検出等、2値検出センサとして産業用途で広く利用されています。これらの光電センサ及びその応用製品の長寿命化や設置性改善に応用出来ます。
「リクレッサ」について更に詳しく知りたい方は、こちらよりお問合せ下さい。